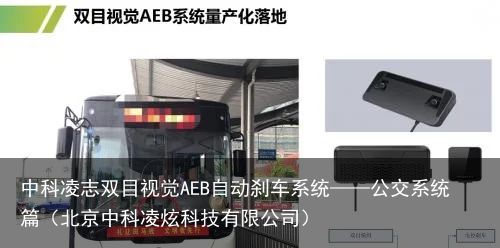
摘要:AEB系统简单来说就是汽车的自动刹车,它包括双目感知模块,决策控制模块(雷达可选),报警刹车模块。在
AEB系统简单来说就是汽车的自动刹车,它包括双目感知模块,决策控制模块(雷达可选),报警刹车模块。在车辆发生危险且驾驶员未采取主动干预的情况下,AEB系统会介入干预。交通部也在2019年4月针对AEB提出了一个1242的指导性文件及标准。
可能之前大家接触更多的是ADAS辅助驾驶,它包括语音提示、图像警示,没有牵扯到对本车的干预,所以在行驶过程中,大家可能觉得产品刚装上去一个月的时候,你会觉得好像有点用,但是当你用上三个月以后,你就已经习惯了它的声音,不觉得这是一个警示音,会形成习惯性忽略。但在AEB这个场景下,提出了更高的要求。所以在之前的ADAS这个领域,大家都是在预警、提示,当出现疲劳驾驶的时候,特别是针对大客车、大货车,特种大车在疲劳驾驶和违规操作车辆的时候,你提示他是没太多作用的,必须加入主动的干预。所以我们就推出了主动控制类别的产品,叫全天候双目视觉AEB自动紧急刹车系统。也是国内率先使用双目立体视觉的AEB自动刹车辅助系统,目前此系统率先用在了城市公交系统。

因为率先在城市公交使用,所以对传感器会提出更高的要求,城市的道路复杂性决定了必须全天候全障碍物测距,识别。
了解双目立体相机的都知道,双目视觉无需建模就可直接由立体点云提取障碍物,利用视差精准测距而非识别后估距,并可利用单路图像识别障碍物类型,形成高质量的单双目融合感知数据。
如果不理解,简单可以看上图,图一上面是实景,下面是PC实录的点云图。图二是我们夜测的图像,可以看到我们的相机识别是非常明朗化的。图三是我们在模拟一个非标物体突然冲到路中间的常规测试,我们的AEB系统完全掌控,你可以把它认为是一个异形物体,因为这个并不像人。最后这个是我们拿了一个模特站在路中间,也是测试我们的双目相机对它的识别。所以我一直强调的是,中科凌志双目立体相机是不用针对标准物体,我针对任意非标物体做出测距和识别的,因为在刹车这个领域,比如说路中间一个石头、一个草丛、一个灌木丛,包括是一棵树,或者是一个沙发摆在路中间,有很多传感器会错判误判,刹车就肯定不精准,双目能完美地解决这样一个问题。
目前在我们的产品在宁波、福建、杭州、贵州都有列装在城市公交车上,并且公交集团反馈的体验非常好。
随机内容
-
 全自动洗车多少钱一台?了解洗车机的价格和因素(无接触全自动洗车机多少钱)
全自动洗车多少钱一台?了解洗车机的价格和因素(无接触全自动洗车机多少钱)
-
前日降雨 昨日沈城洗车生意异常火爆 洗车店爆满 加油站洗车排长队(沈阳洗车多少钱一次)
-
人性化洗车服务出现,上门洗车瞄准市场
-
 没时间洗车 那就把这款保时捷卡宴贴贴个车衣吧(卡宴贴什么车衣)
没时间洗车 那就把这款保时捷卡宴贴贴个车衣吧(卡宴贴什么车衣)
-
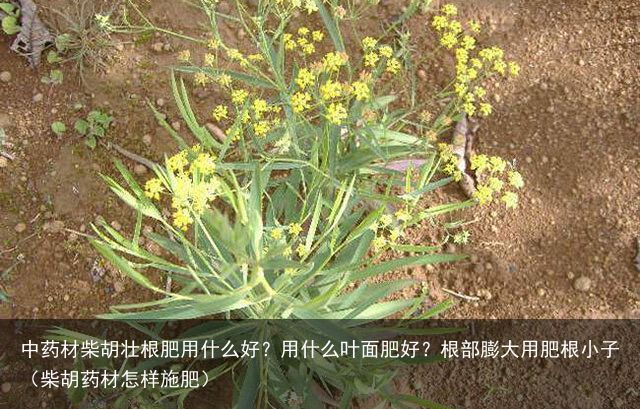 中药材柴胡壮根肥用什么好?用什么叶面肥好?根部膨大用肥根小子(柴胡药材怎样施肥)
中药材柴胡壮根肥用什么好?用什么叶面肥好?根部膨大用肥根小子(柴胡药材怎样施肥)
-
京东汽车洗车机品质联盟成立,承诺若有虚标、残次品将按成交价10倍赔偿(京东洗车服务电话号码)
-
 住高层如何畅快洗车?哪些洗车硬件需要添置?本文传授你最全自助洗车攻略(6楼洗车要多长水管)
住高层如何畅快洗车?哪些洗车硬件需要添置?本文传授你最全自助洗车攻略(6楼洗车要多长水管)
-
 频繁洗车和长期不洗车哪个对车子伤害更大?(常洗车对车好吗)
频繁洗车和长期不洗车哪个对车子伤害更大?(常洗车对车好吗)
-
 大众车主和企业需要的洗车设备真的不一样吗?(企业洗车平台)
大众车主和企业需要的洗车设备真的不一样吗?(企业洗车平台)
-
易捷欲打造汽服平台 构建“加油洗车”新场景(易捷加多少钱的油有免费洗车券)
